

ဉာဏ်ရည်ထက်မြက်သော ထုတ်လုပ်မှုနှင့် စက်ရုပ်များ အရှိန်အဟုန်ဖြင့် ဖွံ့ဖြိုးတိုးတက်လာသည်နှင့်အမျှ၊ လူသားဆန်သော စက်ရုပ်များ၏ လက်သွက်လက်သွက်လက်မှုသည် ပြင်ပကမ္ဘာနှင့် အပြန်အလှန်ဆက်သွယ်မှုအတွက် ကိရိယာတစ်ခုအဖြစ် ပို၍အရေးကြီးလာသည်။ လက်သွက်သောလက်ကို စက်ရုပ်များသည် ဆုပ်ကိုင်ခြင်း၊ ခြယ်လှယ်ခြင်းနှင့် အာရုံခံခြင်းစသည့် ကွဲပြားသောအလုပ်များကို လုပ်ဆောင်နိုင်စေသည့် ရှုပ်ထွေးသောဖွဲ့စည်းပုံနှင့် လုပ်ဆောင်ချက်များမှ လှုံ့ဆော်ပေးပါသည်။ စက်မှုလုပ်ငန်းသုံး အလိုအလျောက်စနစ်နှင့် ဉာဏ်ရည်တုနည်းပညာများ၏ စဉ်ဆက်မပြတ်တိုးတက်နေသည့်အတွက်၊ လက်သွက်သောလက်များသည် ထပ်ခါတလဲလဲလုပ်ဆောင်နိုင်သည့်လုပ်ငန်းတစ်ခုတည်းမှ ရှုပ်ထွေးပြီး ပြောင်းလဲနိုင်သောအလုပ်များကိုလုပ်ဆောင်နိုင်သည့် ဉာဏ်ရည်ထက်မြက်သောကိုယ်ခန္ဓာသို့ တဖြည်းဖြည်းပြောင်းလဲလာပါသည်။ ဤအသွင်ပြောင်းခြင်းလုပ်ငန်းစဉ်တွင်၊ ပြည်တွင်းလက်သွက်သောလက်၏ ယှဉ်ပြိုင်နိုင်စွမ်းသည် တဖြည်းဖြည်း ပေါ်ထွက်ခဲ့ပြီး အထူးသဖြင့် မောင်းကိရိယာ၊ ဂီယာကိရိယာ၊ အာရုံခံကိရိယာစသည်ဖြင့် နေရာဒေသချဲ့ထွင်ခြင်း လုပ်ငန်းစဉ်သည် လျင်မြန်ပြီး ကုန်ကျစရိတ် အားသာချက်မှာ သိသာထင်ရှားပါသည်။
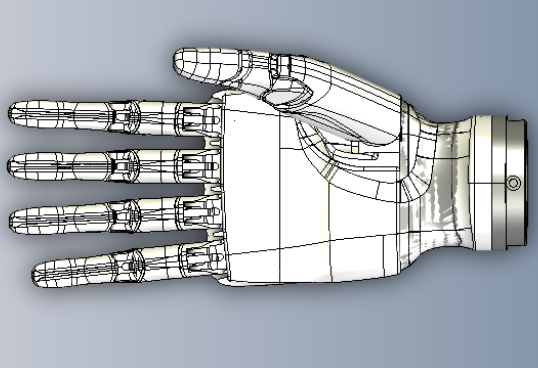
ဂြိုလ်rollersသမားတွေလူသားဆန်သော စက်ရုပ်တစ်ရုပ်၏ “ခြေလက်အင်္ဂါများ” ၏ အဓိကအချက်အချာဖြစ်ပြီး တိကျသော မျဉ်းသားလှုပ်ရှားမှုကို ထိန်းချုပ်ပေးရန်အတွက် လက်များ၊ ခြေထောက်များနှင့် လက်သွက်သောလက်များ အပါအဝင် အပလီကေးရှင်းအမျိုးမျိုးတွင် အသုံးပြုနိုင်သည်။ Tesla ၏ Optimus torso သည် rotary joints 14 ခု၊ linear joints 14 ခုနှင့် လက်ထဲတွင် hollow cup joint 12 ခုတို့ကို အသုံးပြုထားသည်။ တူညီသောအဆစ်များသည် မတူညီသောအဆစ်များ၏ load-bearing လိုအပ်ချက်များနှင့်လိုက်လျောညီထွေဖြစ်စေရန်အတွက် 500N၊ 3,900N နှင့် 8,000N တို့ကို အရွယ်အစားသုံးမျိုးခွဲခြားထားသည့် linear joints (တံတောင်ဆစ်တွင် 2 ခု၊ လက်ကောက်ဝတ်တွင် 4 ခုနှင့် ခြေထောက်တွင် 8 ခု) ကိုအသုံးပြုသည်။
Tesla သည် ၎င်း၏ humanoid စက်ရုပ် Optimus တွင် ပြောင်းပြန်ဂြိုလ်ကြိတ် ဝက်အူများကို အသုံးပြုခြင်းသည် အထူးသဖြင့် ဝန်တင်ဆောင်နိုင်မှုနှင့် တင်းမာမှုဆိုင်ရာ စွမ်းဆောင်ရည်များတွင် ၎င်းတို့၏ အားသာချက်များအပေါ် အခြေခံ၍ ဖြစ်နိုင်သည်။ သို့သော်လည်း ဝန်ပိုတင်ဆောင်နိုင်သော စွမ်းရည်သတ်မှတ်ချက်များ နည်းပါးသော humanoid စက်ရုပ်များသည် ကုန်ကျစရိတ်သက်သာသော ဘောလုံးဝက်အူများကို အသုံးပြုသည်ဟု ငြင်းဆို၍မရပါ။
ဘောလုံး ၎ကျယ်ပြန့်သောအသုံးချပရိုဂရမ်များနှင့် စျေးကွက်တောင်းဆိုမှုတွင် မတူညီသောစက်မှုလုပ်ငန်းမှ ဝန်ထမ်းများ၊
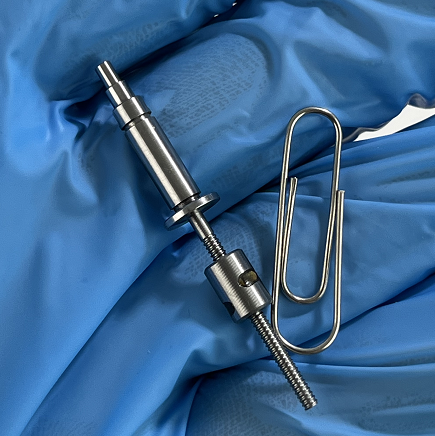
2024 Beijing Robotics Exhibition တွင် KGG သည် 4mm အချင်း planetary roller screws နှင့် 1.5mm အချင်း ball screws များကို ပြသခဲ့သည်။ ထို့အပြင် KGG သည် ပေါင်းစည်းထားသော planetary roller screw solutions ဖြင့် လက်သွက်သောလက်များကိုလည်း ပြသခဲ့သည်။


အချင်း 4 မီလီမီတာ ဂြိုဟ်တုကြိတ်စက် ဝက်အူများ


1. စွမ်းအင်သစ် မော်တော်ကားများတွင် အသုံးချခြင်း- မော်တော်ကားများ၏ လျှပ်စစ်ဓာတ်အားနှင့် ဉာဏ်ရည်ဉာဏ်သွေး တိုးတက်ကောင်းမွန်လာမှုနှင့်အတူ၊ဘောလုံးဝက်အူများမော်တော်ကားနယ်ပယ်တွင် မော်တော်ယာဥ်အစွန်း-ဘီးဝိုင်ယာဘရိတ်စနစ် (EMB)၊ နောက်ဘီးစတီယာရင်စနစ် (iRWS)၊ စတီယာရင်တိုင်ကြိုးစနစ် (SBW)၊ ဆိုင်းထိန်းစနစ် စသည်တို့အပြင် မော်တော်ယာဥ်အစိတ်အပိုင်းများအတွက် စက်ပစ္စည်းများကို ထိန်းညှိခြင်းနှင့် ထိန်းချုပ်ခြင်းကဲ့သို့သော မော်တော်ယာဥ်နယ်ပယ်တွင် ပိုမိုနက်ရှိုင်းလာပါသည်။
2. စက်ကိရိယာစက်မှုလုပ်ငန်းကိုအသုံးချခြင်း- ဘောလုံးဝက်အူသည် စက်ကိရိယာများ၏စံ core အစိတ်အပိုင်းများထဲမှတစ်ခုဖြစ်ပြီး စက်ကိရိယာများတွင် rotary axes နှင့် linear axes များပါ၀င်သည်၊ linear axes များသည် screw များနှင့်ဖွဲ့စည်းထားသည်။လမ်းပြသံလမ်းများworkpiece ၏တိကျသော positioning နှင့်ရွေ့လျားမှုအောင်မြင်ရန်။ ရိုးရာစက်ကိရိယာများကို အဓိကအားဖြင့် trapezoidal screws/sliding screws များကိုအသုံးပြုသည်၊ CNC စက်ကိရိယာများသည် သမားရိုးကျစက်ကိရိယာများကိုအခြေခံ၍ ဒစ်ဂျစ်တယ်ထိန်းချုပ်မှုစနစ်များကိုထည့်သွင်းသည်၊ drive workpiece တိကျမှုလိုအပ်ချက်များသည်ပိုမိုမြင့်မားပြီး ball screws များကိုလက်ရှိတွင်ပိုမိုအသုံးပြုကြသည်။ ကမ္ဘာလုံးဆိုင်ရာ စက်ကိရိယာစက်ရုံ ထောက်ပံ့မှုကွင်းဆက်ရှိ spindle၊ ချိန်သီးခေါင်း၊ rotary table နှင့် စိတ်ကြိုက်ပြုပြင်ခြင်း သို့မဟုတ် ကွဲပြားခြင်းအတွက် ထည့်သွင်းစဉ်းစားရန်အတွက် စက်ကိရိယာစက်ရုံအများစု၏ အခြားလုပ်ငန်းဆောင်တာအစိတ်အပိုင်းများသည် ကိုယ်တိုင်ထုတ်လုပ်ပြီး ကိုယ်တိုင်ထုတ်လုပ်လေ့ရှိသော်လည်း rolling functional components များသည် အခြေခံအားဖြင့် outsourcing ဖြစ်ကာ စက်ကိရိယာစက်မှုလုပ်ငန်းနှင့် rolling functional components များ၏ ခိုင်မာသောဝယ်လိုအားကို တိုးမြင့်စေသည်။


1.5mm အချင်းဘောလုံးဝက်အူများ
3.humanoid စက်ရုပ်အသုံးချမှုများ- humanoid စက်ရုပ် actuator များကို ပရိုဂရမ်နှစ်ခု၏ ဟိုက်ဒရောလစ်နှင့် မော်တာယန္တရားများအဖြစ် ပိုင်းခြားထားသည်။ ဟိုက်ဒရောလစ်ယန္တရားသည် စွမ်းဆောင်ရည်ပိုကောင်းသော်လည်း ကုန်ကျစရိတ်နှင့် ပြုပြင်ထိန်းသိမ်းမှုစရိတ်များ ပိုမိုမြင့်မားပြီး လက်ရှိအသုံးပြုမှုနည်းပါးသည်။ မော်တာဖြေရှင်းချက်သည် လက်ရှိပင်မရွေးချယ်မှုဖြစ်ပြီး၊ ဂြိုလ်ဒလိမ့်တုံးဝက်အူသည် ခိုင်ခံ့သောဝန်ထမ်းစွမ်းရည်ရှိပြီး၊ ၏အဓိကအစိတ်အပိုင်းဖြစ်သည်။linear actuatorစက်ရုပ်အဆစ်များ၏ တိကျသော ထိန်းချုပ်မှုကို နားလည်ရန် အသုံးပြုသည့် humanoid စက်ရုပ်။ နိုင်ငံရပ်ခြား Tesla၊ မြူးနစ်တက္ကသိုလ်ရှိ LOLA စက်ရုပ်၊ ပြည်တွင်း Polytechnic Huahui၊ Kepler သည် ဤနည်းပညာလမ်းကြောင်းကို အသုံးပြုခဲ့သည်။
planetary roller screws များအတွက်၊ လက်ရှိပြည်တွင်း planetary roller screw စျေးကွက်ကို နိုင်ငံခြားထုတ်လုပ်သူများမှ အဓိက သိမ်းပိုက်ထားပြီး Switzerland Rollvis၊ Switzerland GSA နှင့် Sweden Ewellix ၏ စျေးကွက်ဝေစုမှာ 26%, 26%, 14% ဖြစ်သည်။
ဂြိုလ်ကြိတ်စက်ဝက်အူများနှင့် နိုင်ငံခြားလုပ်ငန်းများ၏ ပင်မနည်းပညာတွင် ပြည်တွင်းစီးပွားရေးလုပ်ငန်းများသည် တိကျသေချာသော ကွာဟချက်ရှိသော်လည်း ခဲတိကျမှု၊ အမြင့်ဆုံး ရွေ့လျားဝန်၊ အမြင့်ဆုံး တည်ငြိမ်ဝန်နှင့် အခြားစွမ်းဆောင်ရည်ဆိုင်ရာ ကဏ္ဍများကို တဖြည်းဖြည်းဖမ်းစားလိုက်ရာ ပြည်တွင်းဂြိုဟ်ကြိတ်ဝက်အူထုတ်လုပ်သူများသည် စျေးကွက်ဝေစု 19% ဖြစ်သည်။
စာတိုက်အချိန်- ဖေဖော်ဝါရီ ၂၈-၂၀၂၅




