

နိယာမscrew stepper မော်တာ: ဝက်အူနှင့် အခွံမာသီးများကို ချိတ်ဆက်ရန်အတွက် အသုံးပြုကြပြီး ဝက်အူနှင့် nut တို့သည် တစ်ခုနှင့်တစ်ခု ဆက်စပ်မလှည့်နိုင်အောင် ထိန်းထားသောကြောင့် ဝက်အူကို axially ရွှေ့နိုင်စေပါသည်။ ယေဘူယျအားဖြင့်၊ ဤအသွင်ပြောင်းခြင်းကို နားလည်ရန် နည်းလမ်းနှစ်ခုရှိသည်။
ပထမအချက်မှာ မော်တာအတွင်းသို့ အတွင်းပိုင်းချည်မျှင်များဖြင့် ရဟတ်တစ်လုံးကို တည်ဆောက်ရန်နှင့် သဘောပေါက်ရန်ဖြစ်သည်။linear ရွေ့လျားမှုpenetrating screw stepping motor ဟုခေါ်သော rotor ၏အတွင်းပိုင်းချည်များနှင့် ဝက်အူများကို ချိတ်ဆက်ခြင်းဖြင့်။ (အခွံမာသီးကို မော်တာရဟတ်နှင့် ပေါင်းစပ်ထားပြီး ဝက်အူရိုးသည် မော်တာရဟတ်၏ အလယ်ဗဟိုကို ဖြတ်သန်းသွားပါသည်။ အသုံးပြုသည့်အခါတွင်၊ ဝက်အူကို ပြုပြင်ပြီး မော်တာအား ပါဝါတက်လာပြီး ရဟတ်လှည့်သောအခါတွင် မော်တာသည် ဝက်အူတစ်လျှောက် မျဉ်းဖြောင့်အတိုင်း ရွေ့လျားသွားမည်ဖြစ်သည်။ (ဆန့်ကျင်ဘက်အနေနှင့်၊ ဝက်အူကို တပ်ဆင်နေချိန်တွင် မော်တာအား ပြုပြင်ပါက၊ ဝက်အူလိုင်းအား ဆန့်ကျင်ဘက်သို့ ရွေ့လျားသွားမည်ဖြစ်သည်။)
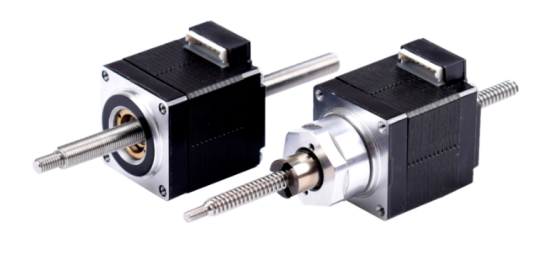
ဖြတ်သန်းဝင်ရိုး အမျိုးအစား
ဒုတိယက ယူဖို့ပါ။ဝက်အူမော်တာအထွက်ရိုးတံကဲ့သို့၊ မော်တာအတွင်းအပြင်ဘက်တွင် ပြင်ပ drive nut နှင့် screw engagement မှတဆင့် linear လှုပ်ရှားမှုကိုသိရှိနိုင်စေရန်၊ ၎င်းသည် ပြင်ပ drive အမျိုးအစား screw stepping motor ဖြစ်သည်။ ရလဒ်မှာ ပြင်ပစက်ပိုင်းဆိုင်ရာ ချိတ်ဆက်မှု မတပ်ဆင်ဘဲ ဝက်အူ stepper မော်တာဖြင့် တိုက်ရိုက်လုပ်ဆောင်နိုင်စေရန် များစွာသော အပလီကေးရှင်းများတွင် တိကျသော linear ရွေ့လျားမှုကို ပံ့ပိုးပေးသည့် အလွန်ရိုးရှင်းသော ဒီဇိုင်းဖြစ်သည်။ (အခွံမာသီးသည် မော်တာ၏အပြင်ဘက်တွင်ရှိပြီး ဒရိုက်ယန္တရားနှင့် တွဲထားသည်။ မော်တာလှည့်သောအခါ၊ ဝက်အူတစ်လျှောက်တွင် nut သည် မျဉ်းဖြောင့်အတိုင်းရွေ့လျားသည်။)
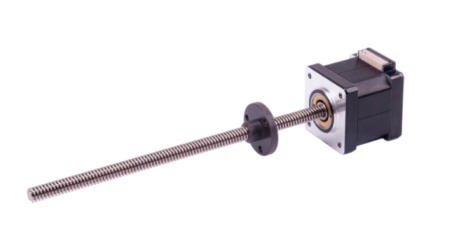
ပြင်ပ Drive အမျိုးအစား
ဝင်ရိုးမှတဆင့် linear stepping motor ၏အသုံးချမှုအားသာချက်များ:
ပြင်ပမှမောင်းနှင်သော linear stepper မော်တာများနှင့် တွဲဖက်အသုံးပြုသည့် အပလီကေးရှင်းအခြေအနေများကို နှိုင်းယှဉ်ခြင်း။linear လမ်းညွှန်များဝင်ရိုးဖြတ်သွားသော လိုင်းနား stepper မော်တာများသည် ၎င်းတို့၏ကိုယ်ပိုင်ထူးခြားသော အားသာချက်များ ရှိပြီး၊ အဓိကအားဖြင့် အောက်ပါ ရှုထောင့် 3 ခုတွင် ထင်ဟပ်နေပါသည်။
1.ပိုကြီးသော စနစ်ထည့်သွင်းမှု အမှားကို ခွင့်ပြုသည်-
ယေဘူယျအားဖြင့်၊ ပြင်ပမှမောင်းနှင်သော linear stepper motor ကိုအသုံးပြုပါက၊ screw နှင့် guideway mounting အကြားအပြိုင် ညံ့ဖျင်းမှုသည် system ရပ်တန့်ခြင်းကိုဖြစ်ပေါ်စေပါသည်။ သို့သော်၊ ဝင်ရိုးများမှတဆင့် linear stepper မော်တာများဖြင့်၊ ဒီဇိုင်း၏ဖွဲ့စည်းပုံသွင်ပြင်လက္ခဏာများကြောင့်၊ ဤဆိုးရွားသောပြဿနာကို ပိုမိုကောင်းမွန်စွာဖြေရှင်းနိုင်သည်၊၊ ပိုကြီးသောစနစ်အမှားအယွင်းကိုဖြစ်စေနိုင်သော ဒီဇိုင်းပုံစံကြောင့်ဖြစ်သည်။
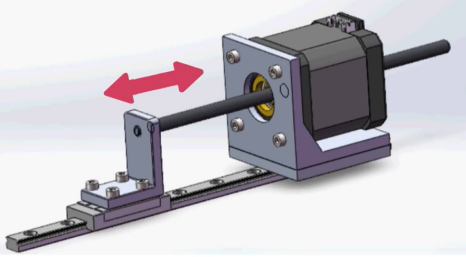
မော်တာအား အားဖြည့်သောအခါ၊ nut သည် ရဟတ်ဖြင့် လှည့်ပြီး ဝက်အူကို ပြင်ပဝန်တစ်ခုနှင့် ချိတ်ဆက်ထားပြီး လမ်းညွန်တစ်လျှောက် မျဉ်းဖြောင့်အတိုင်း ရွေ့လျားသည်။
2.ဝက်အူ၏ အရေးကြီးသော အမြန်နှုန်းဖြင့် မကန့်သတ်ထားပေ။
မြန်နှုန်းမြင့် linear ရွေ့လျားမှုအတွက် ပြင်ပမှမောင်းနှင်သော linear stepper မော်တာများကို ရွေးချယ်သောအခါ၊ ၎င်းတို့ကို များသောအားဖြင့် ဝက်အူ၏ အရေးကြီးသောအမြန်နှုန်းဖြင့် ကန့်သတ်ထားသည်။ သို့သော်၊ ဝင်ရိုးဖြတ်သွားသော linear stepper motor ဖြင့်၊ screw သည် fixed နှင့် anti-rotation ဖြစ်ပြီး motor အား linear guideway ၏ slider ကိုမောင်းနှင်နိုင်စေပါသည်။ ဝက်အူသည် ငြိမ်နေသောကြောင့် မြန်နှုန်းမြင့်သည်ကို သိရှိသောအခါတွင် ဝက်အူ၏ အရေးကြီးသောအမြန်နှုန်းကို ကန့်သတ်မထားပေ။
3.၎င်းသည် တပ်ဆင်မှုနေရာကို သက်သာစေသည်-
မော်တာတွင် nut ကိုတည်ဆောက်ထားသည့်ဖွဲ့စည်းပုံဒီဇိုင်းကြောင့် ဝင်ရိုးတစ်ဆင့်ချင်း လိုင်းလိုက်တက်ခြင်း မော်တာသည် ဝက်အူ၏အရှည်ထက် အပိုနေရာမယူပါ။ တူညီသောဝက်အူပေါ်တွင် မော်တာများစွာကို တပ်ဆင်နိုင်သည်။ မော်တာများသည် တစ်ခုနှင့်တစ်ခု "ဖြတ်သန်း" မရနိုင်သော်လည်း ၎င်းတို့၏ရွေ့လျားမှုသည် တစ်ခုနှင့်တစ်ခု သီးခြားဖြစ်သည်။ ထို့ကြောင့်၊ ၎င်းသည် ပိုမိုတင်းကျပ်သော နေရာလိုအပ်ချက်များရှိသော application များအတွက် သင့်လျော်သော ရွေးချယ်မှုတစ်ခုဖြစ်သည်။
ပိုမိုသိရှိလိုပါက, ကျွန်တော်တို့ကိုဆက်သွယ်နိုင်ပါသည်။amanda@kgg-robot.comသို့မဟုတ်+WA၀၀၈၆ ၁၅၂၂၁၅၇၈၄၁၀.
ပို့စ်အချိန်- Feb-11-2025




